原创发表于 DavidZ Blog,遵循 CC 4.0 BY-NC-SA 版权协议,转载请附上原文出处链接及本声明。
敬告
本博客仅供参考,请不要抄袭。
¶前言
这是 ANU COMP2310的第一次大作业,历时一个月左右,也是这个学期我写的最认真的一次作业,所以在博客搭建伊始,我先把这个记录下来。
¶问题
根据Assignment 1 PDF中的描述,大概的意思就是在三维空间中有许多的车,具有速度和加速度(都是三维向量),而且不管是否加速,都会消耗一定的能量,当然加速也会加快能量的消耗。然后就是有一个或多个能量球,当然也是在运动中的,同样具有速度和加速度。当车和能量球靠近的时候,车能够获取到能量球的信息(加速度,速度,位置),并且加满能量,而当车与车靠近的时候,能够互相交换一次信息,这个信息的内容是自己定义的。车在能量耗尽后就消失了,而我们需要做的就是在一定的时间内,保证尽可能多的车存活。
¶分析
其实这个问题最关键的地方在于,没有一个中央的控制节点,也就是说对于每一个车来说都是完全平等且独立的。所以我们需要他们能够尽可能的一直处在能够交流的状态,并且都能知道能量球在哪里。
注意
这个问题在没有中央控制时不存在最优解,我们只能无线接近最优解。
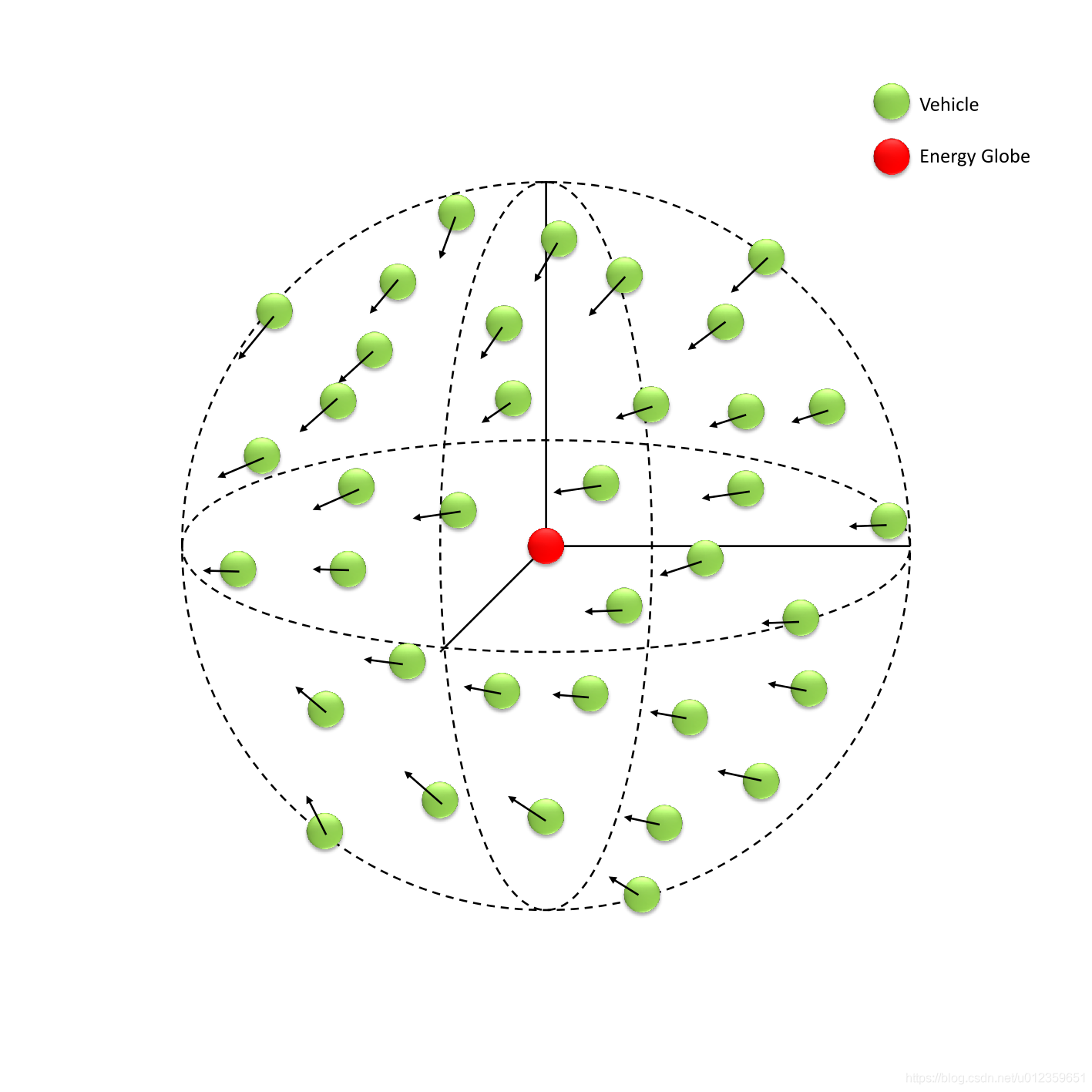
我采用的是球形模型,这个模型参考于这次作业的 Examples。
在和我的同学互相交流时,这个模型是最普遍的,解决方案是最多的,效果也是相对最好的。
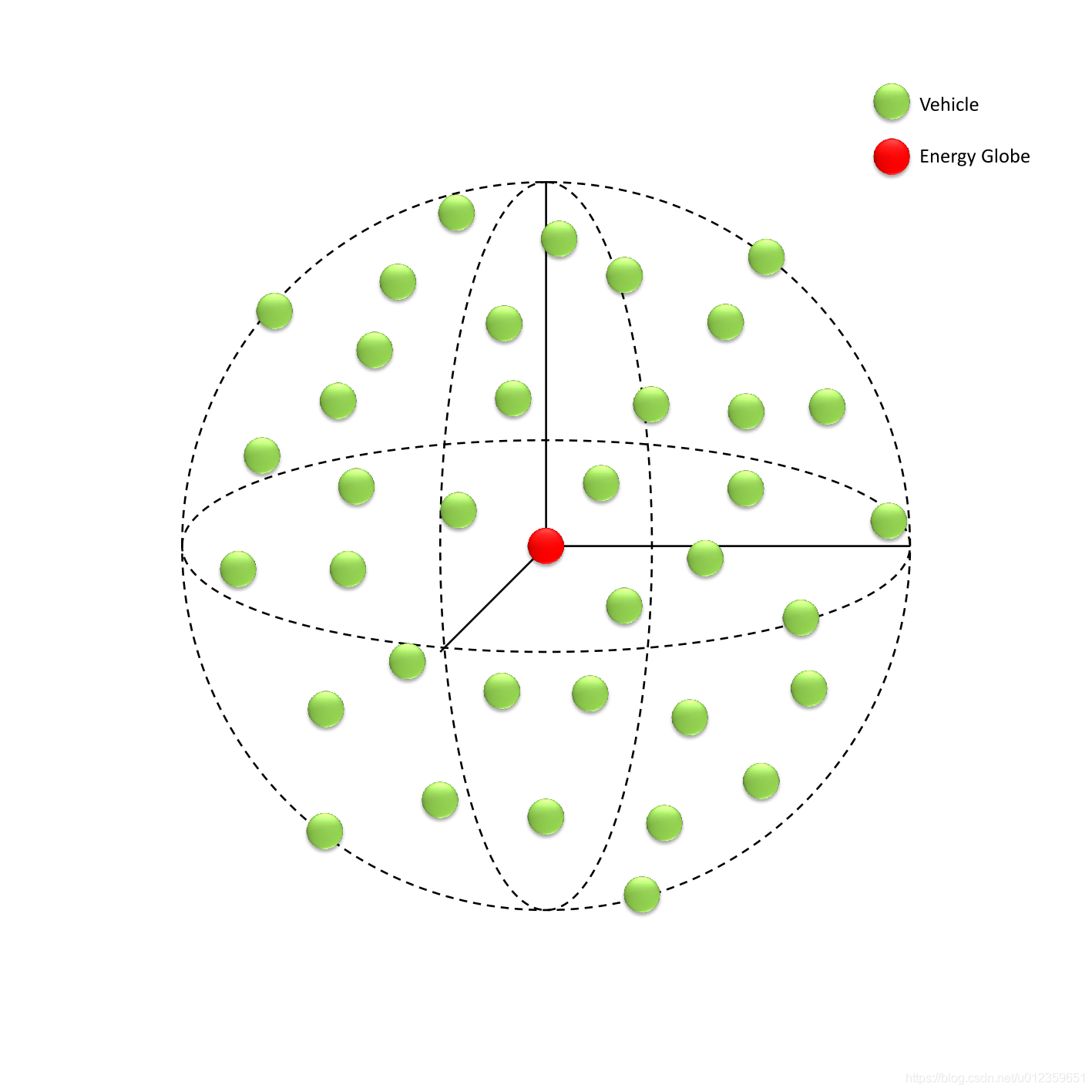
球形模型设计的两大重点是:
- 所有的
车都均匀平等地分布在球面上(球面是个相对概念,可以是球壳???)。 - 所有的
车都能随时交流,也就是说大家形成一个通讯网络。
¶实现
注意
所有的 Ada 代码都是示意性的,有可能不能直接在项目中使用。
¶Stage A&B
这个阶段中,能量球只有一个,我们让所有的车都围绕这个能量球运动来实现一个基本的球形模型。
¶基本程序结构(Basic Program Structure)
程序基本的结构是一个死循环,每次循环分为 4 个步骤:
- 判断
能量球信息 - 发送信息
- 接受信息
- 设置目的地和油门
¶消息结构(Message Structure)
最基础的消息需要包括:
能量球的信息- 获得
能量球信息的时间戳
¶中央控制(Central Control)
允许中央控制是 Stage 1 中的条件,我在作业中跳过了这一部分,因为
- 在允许中央控制时,该问题存在最优解,该最优解应该是一个数学问题,对我来说难度过大。
- 后面的 Stage 2,3,4 均不允许中央控制。
¶能量球位置估计(Energy Globe Position Estimation)
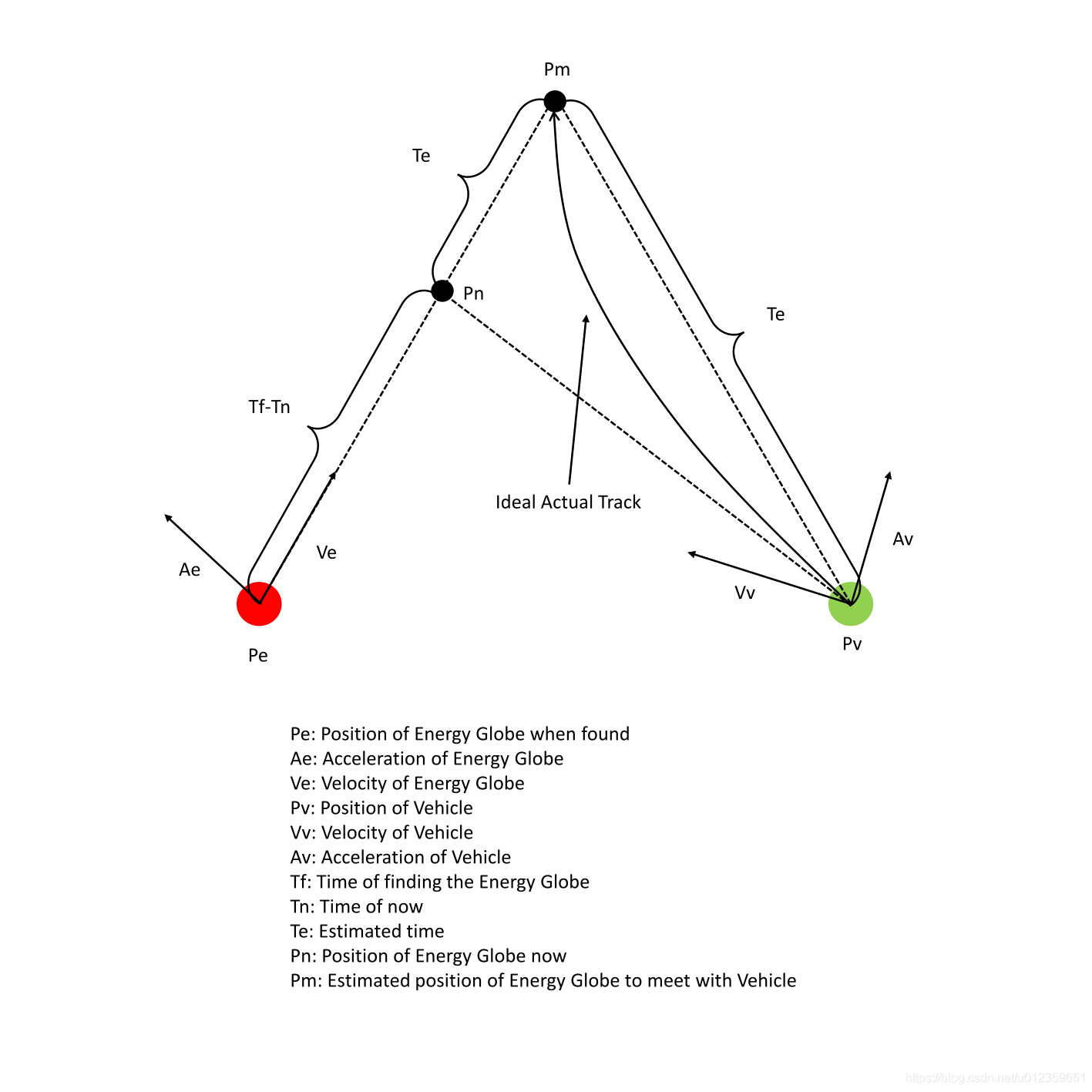
这个问题类似于一个追击问题(红球是一个匀速导弹,蓝球是拦截导弹),我们需要求的是预计追击时间$T_e$。
能量球到追击点$P_m$,两个坐标相同,所以,
$$
P_m=VeT_{total}+P_e
$$
易得总时间,
$$
T_{total}=T_f-T_n+T_e
$$
通过边相等得,
$$
P_e+(T_f-T_n+T_e)V_e=V_vT_e+\frac{1}{2}A_vT_e^2+P_v
$$
即可解出$T_e$。
注意
存在无法追击的情况,即($\Delta<0$),因为我们这里是严格的计算,实际上整个追击过程只有 1-2 秒,并且在不断地更新能量球的信息,所以预计的那一段时间$T_e$通常可以忽略不计。但是在可以计算时,能够提供更加准确的预计到达时间,从而让车能够更加精准的决策何时去充电。
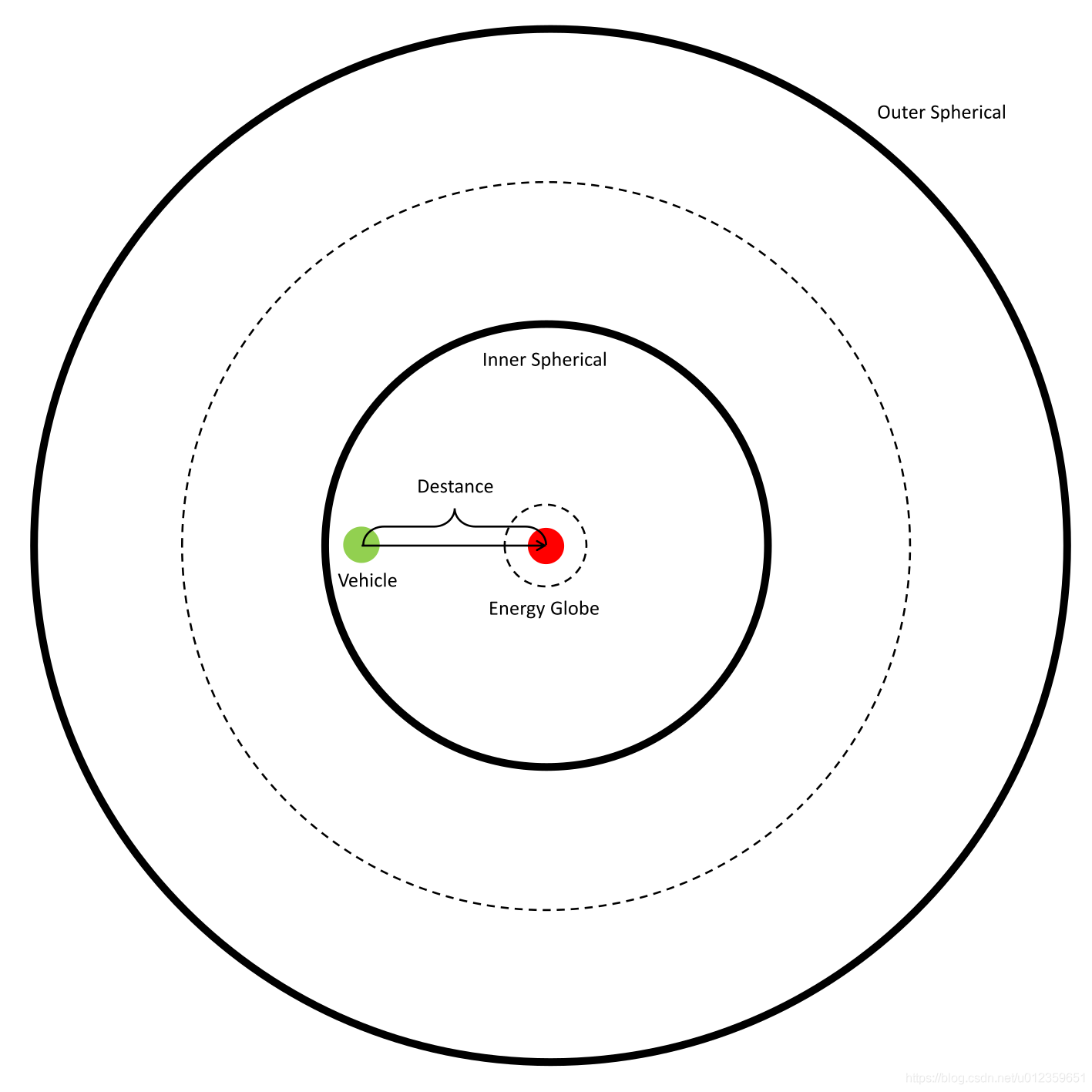
¶充电决策(Charge Determination)
当同时满足以下两个条件时:
车知道能量球的信息车的预计剩余能量小于等于警戒能量
预计剩余能量:
Left_Charge := Current_Charge - Current_Discharge_Per_Sec * Estimated_Time;
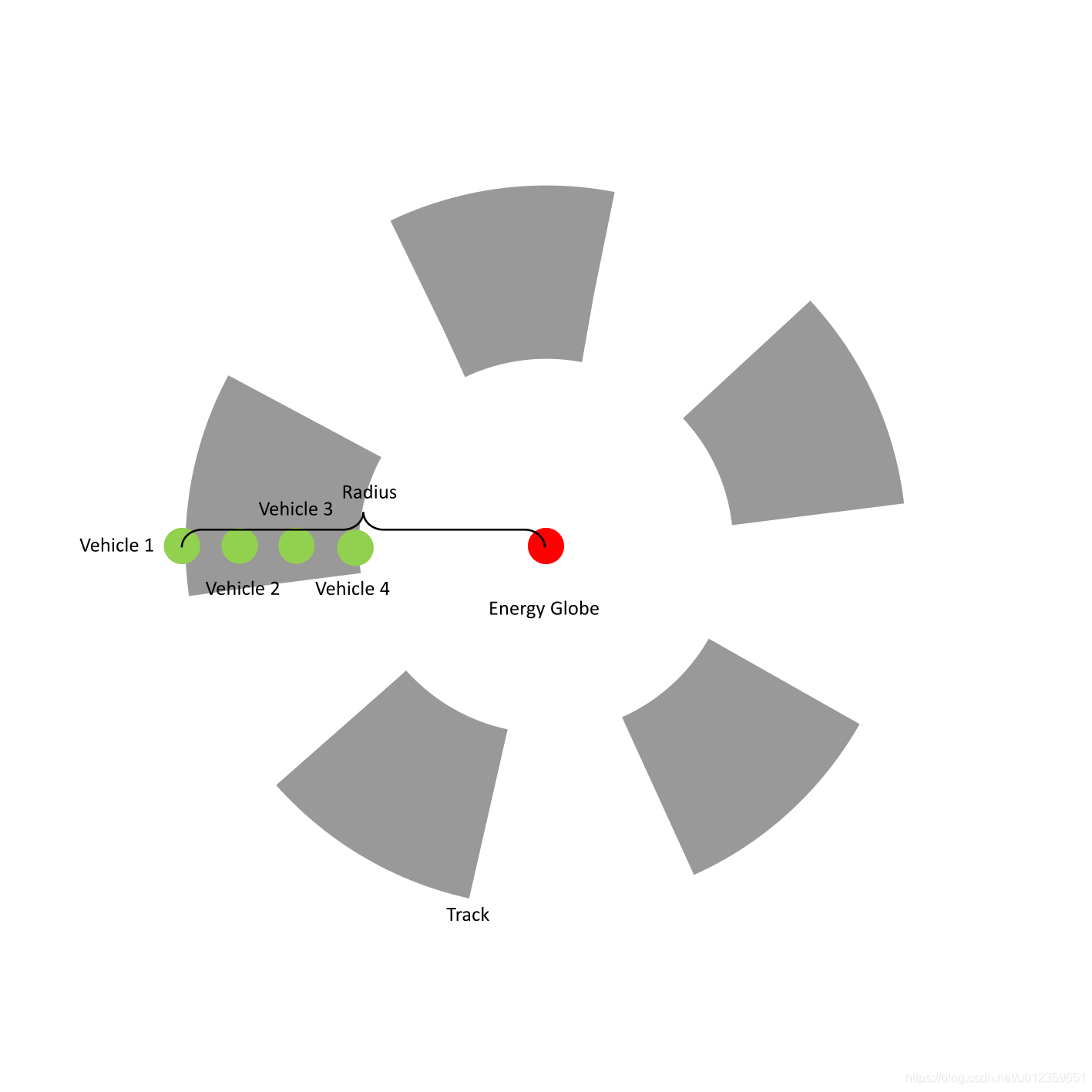
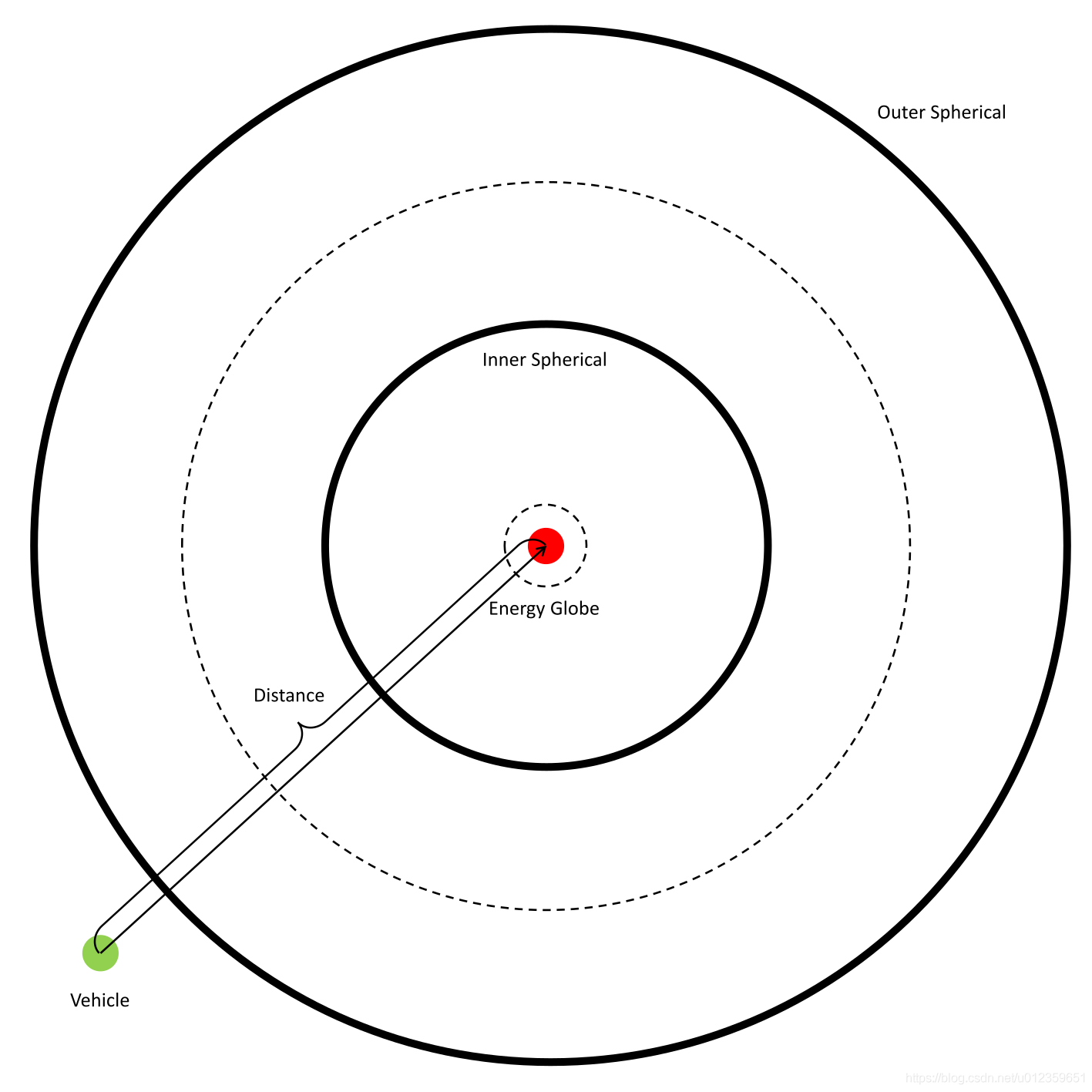
¶半径决策(Radius Determination)
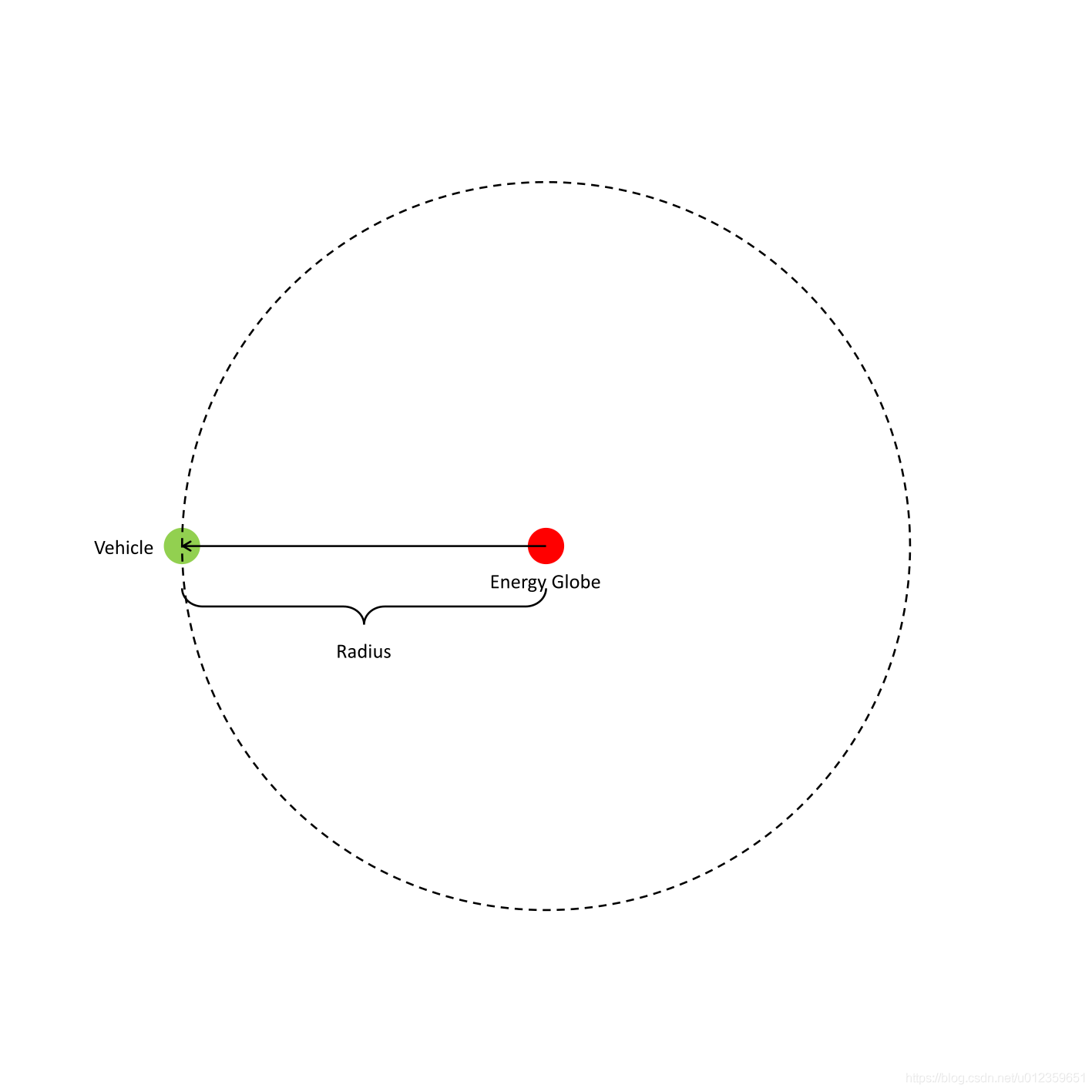
半径向量:
Radius_Vector := Radius_Distance * Norm (Position - Vehicle_Message.EG.Position);
车的位置:
Destination := Vehicle_Message.EG.Position + Radius_Vector;
其中有些变量的值或初始值是由经验确定的
Radius_Distance的值是0.3,是因为多次实验发现在 64 个,128 个,256 个车的情况下0.3表现均衡。Destination的初始值是(0, 0, 0),这样能够避免一开始时车四散,导致失去联系,不能构成球形。
¶使用当前能量优化半径(Radius Optimization With Current Charge)
Radius_Vector = (0.75 + 0.25 * Current_Charge) * Radius_Vector;
0.75和0.25都是人为确定的,没什么依据😄。
¶一个解决碰撞的机制(A Solution To Collision)
注意
这个机制未经过控制变量实验验证,只是理论上分析得到的。

因为车和车离的足够近时会发生碰撞,表现为大家都减速不动。所以当一个车从外层到能量球去加油时,周围的车减速会一定程度的减少碰撞的发生。
实现时,需要在消息结构中添加Vehicle_Charge来判断谁的能量更低。
¶Stage C
这个阶段中,能量球有两个或更多。我们遇到的新问题有:
- 如何决策去围绕哪一个
能量球运动 - 如何自适应球形模型大小的变化
¶多个能量球决策(Multiple Energy Globes Decision)
当有多个能量球时(能量球还有可能凭空消失),每个车都要独立的选择其中一个作为他所在球形模型的球心,而且这个过程时动态的。
我们分两种情况去讨论这个问题:
¶1. 车发现了两个以上能量球
这种情况比较简单,我们只需要从中选择最近的哪一个即可。距离公式如下:
distance := EG.Position + (Clock - EG_Find_Time) * EG.Velocity - Vehicle_Position
¶2. 车从别的车获得的信息中有新的能量球
这种情况实际上是非常复杂的,因为存在一种情况:两个车说的时同一个能量球,但是不是同时发现的,很难判断是否是同一个能量球。
我们可以使用时间戳来判断获得更新的能量球。但是这个更新不能以时间戳作为唯一判据,因为存在一种情况,车A知道一个旧的能量球,但是发现的时间已经过去很久了,车B发现一个新的能量球,从远处靠近车A,时,两车交换信息,该如何选择呢?
所以,我又加入了一个失效时间,来解决上述问题。
Clock - Vehicle_Message.EG_Update_Time > Vehicle_Message_Expire_Time
当上述条件为真时,车才会选择更新的信息。
¶使用旋转优化(Optimization With Rotation)
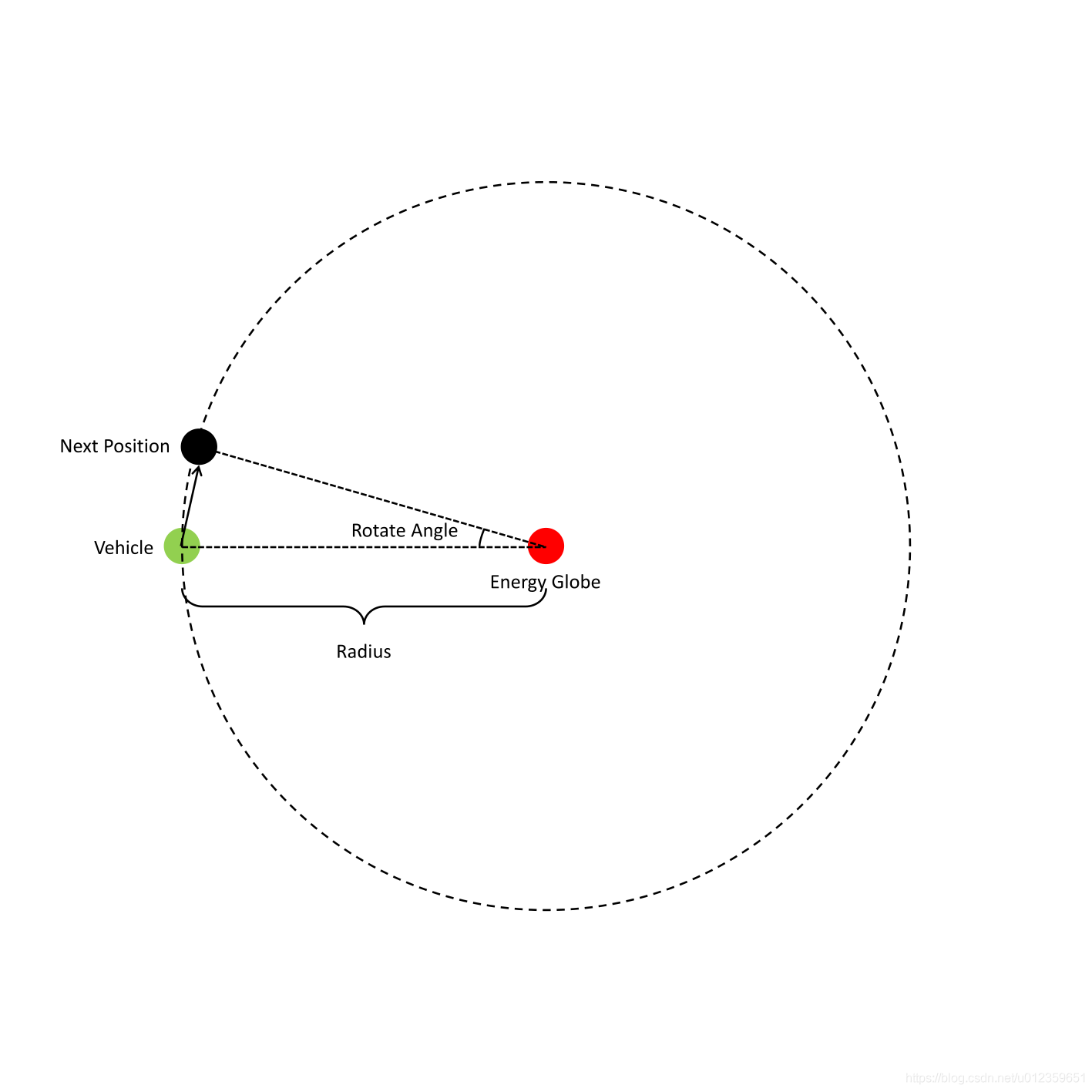
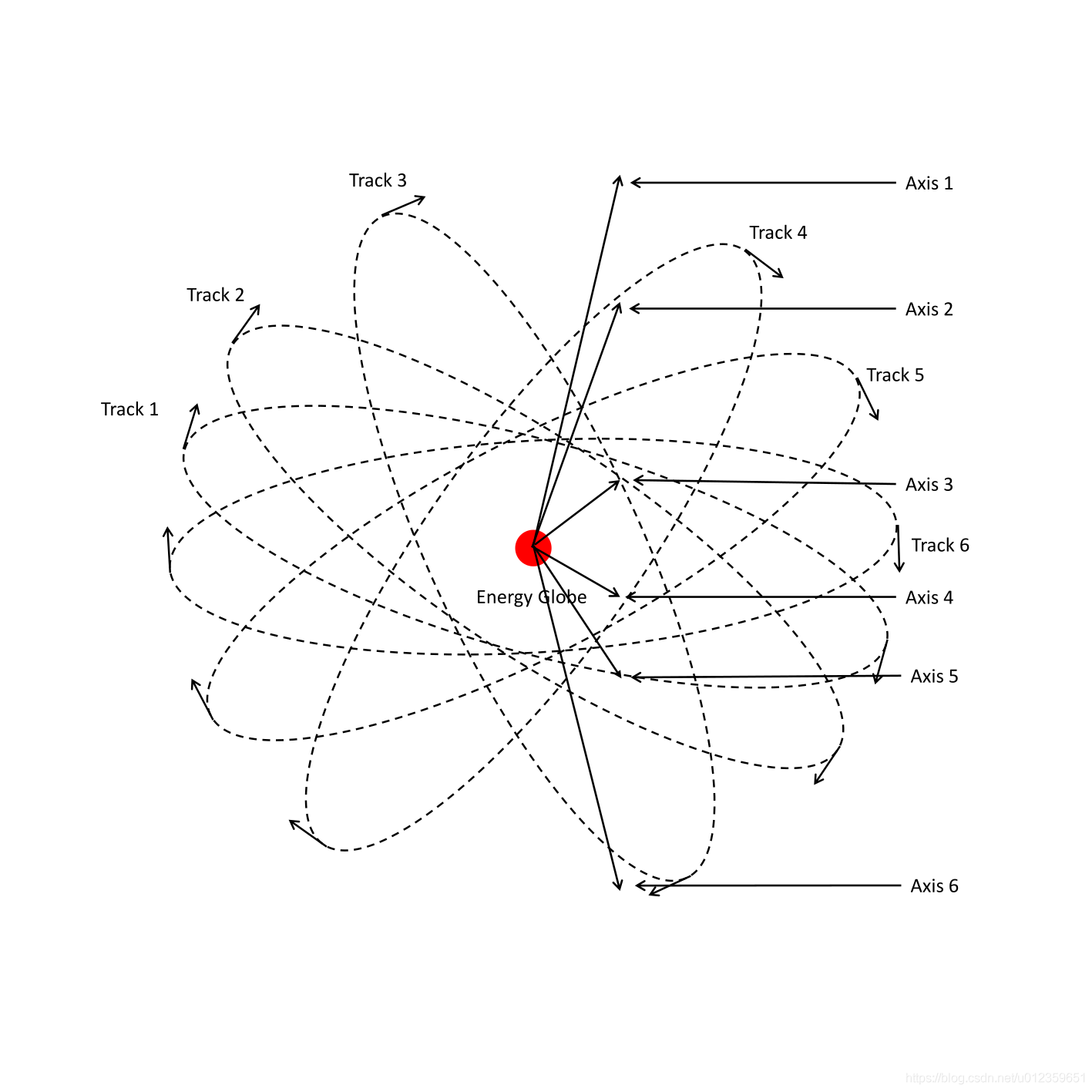
相对于静态的在球面等待,动态的在球面旋转在实验中取得了更稳定的表现。
注意
这个优化措施可能无效,我的同学们对这个优化反应褒贬不一,但是我觉得确实让这个模型更好看啦😄
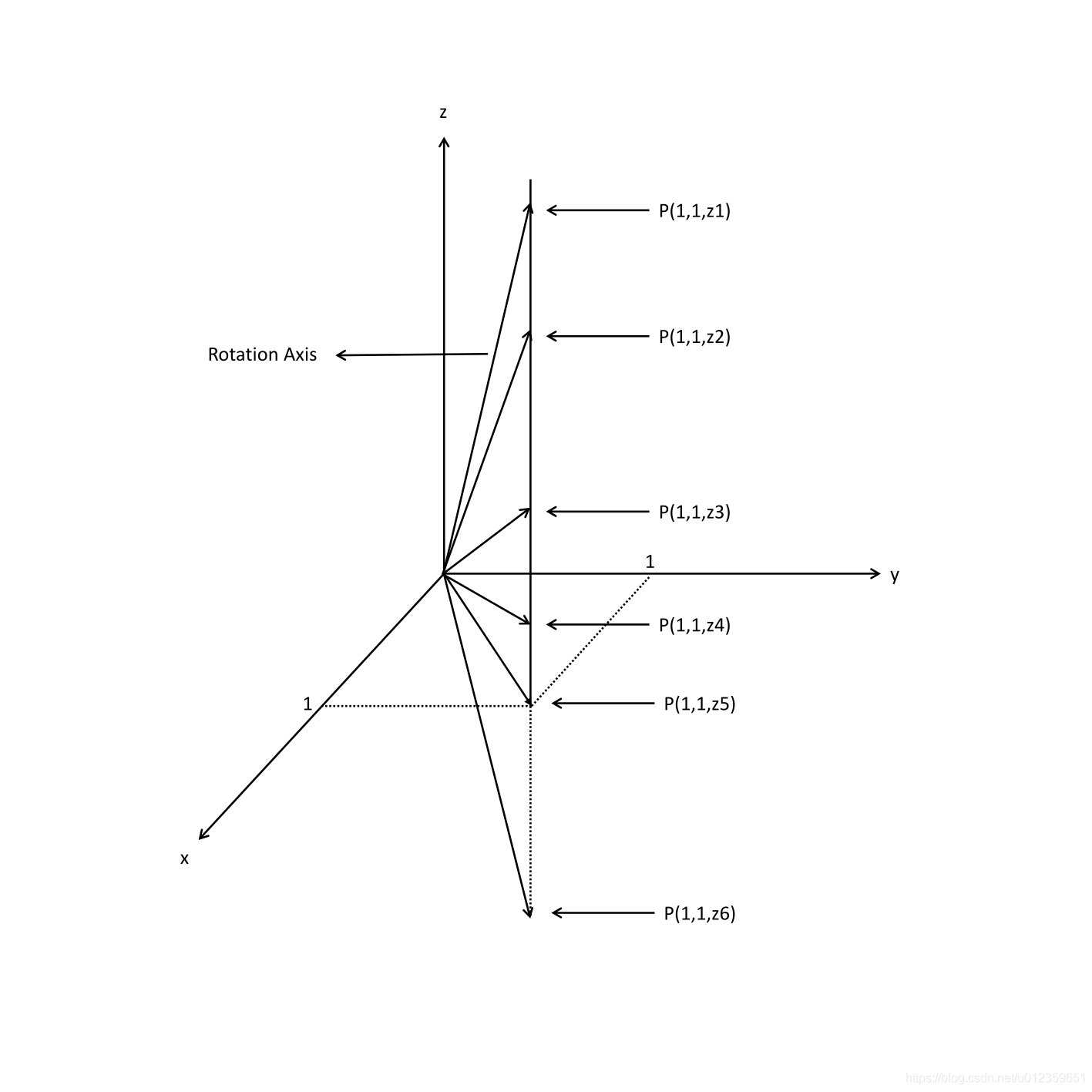
旋转半径向量与旋转轴垂直:
$$
X_rX_a+Y_rY_a+Z_rZ_a=0
$$
易得无数个解,但是为了尽量让两个车不会面对面相撞(随机赋值的话),这里手动赋值$X_a$和$Y_a$为$1$,求得唯一解。
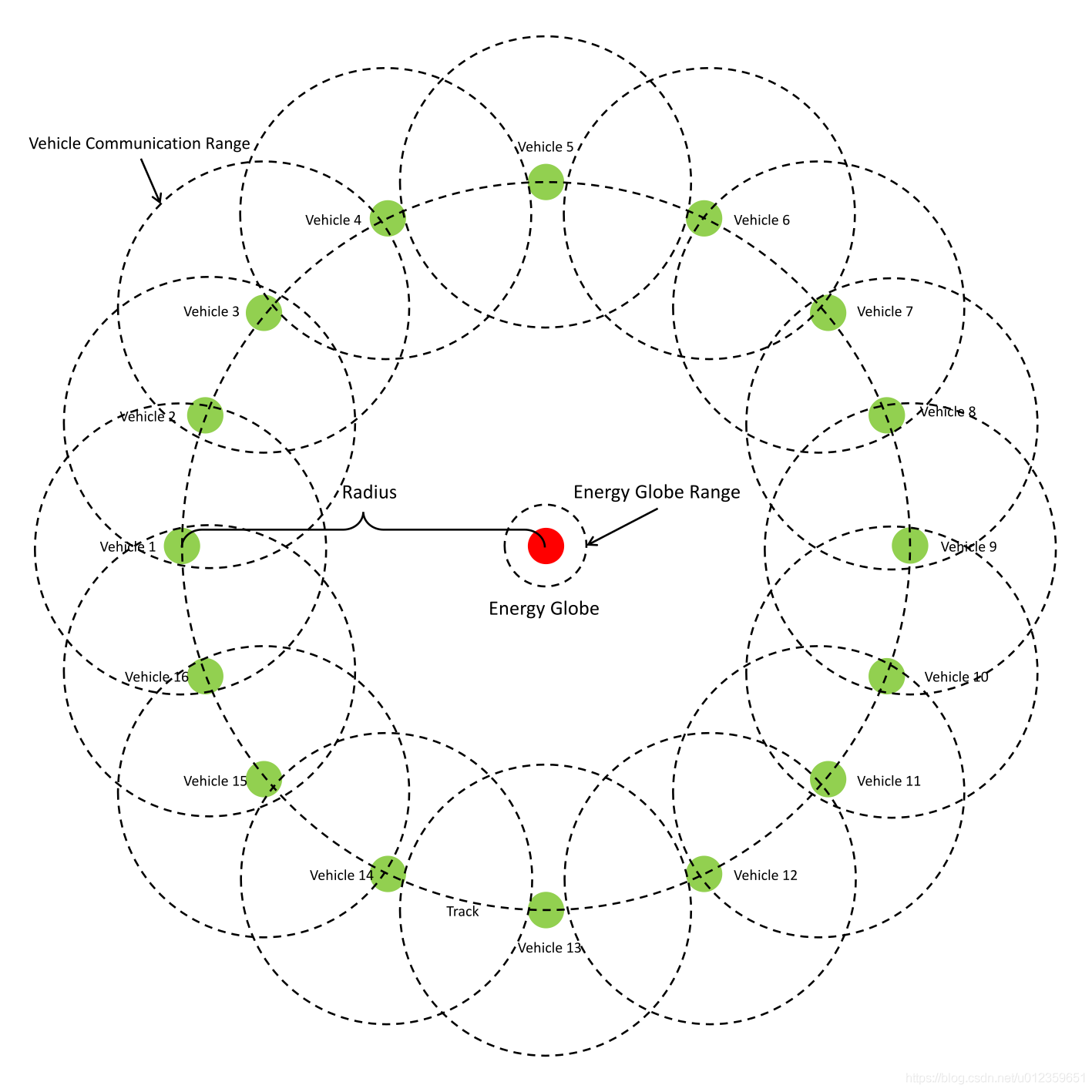
¶自动半径适应(Automatic Radius Adaptation)
我们在 Stage A&B 中的半径是手动设置的,但是在 Stage C 中,每个球星模型的车的数量是动态的,如果半径不跟随数量变化,那么就有可能丢失通讯。
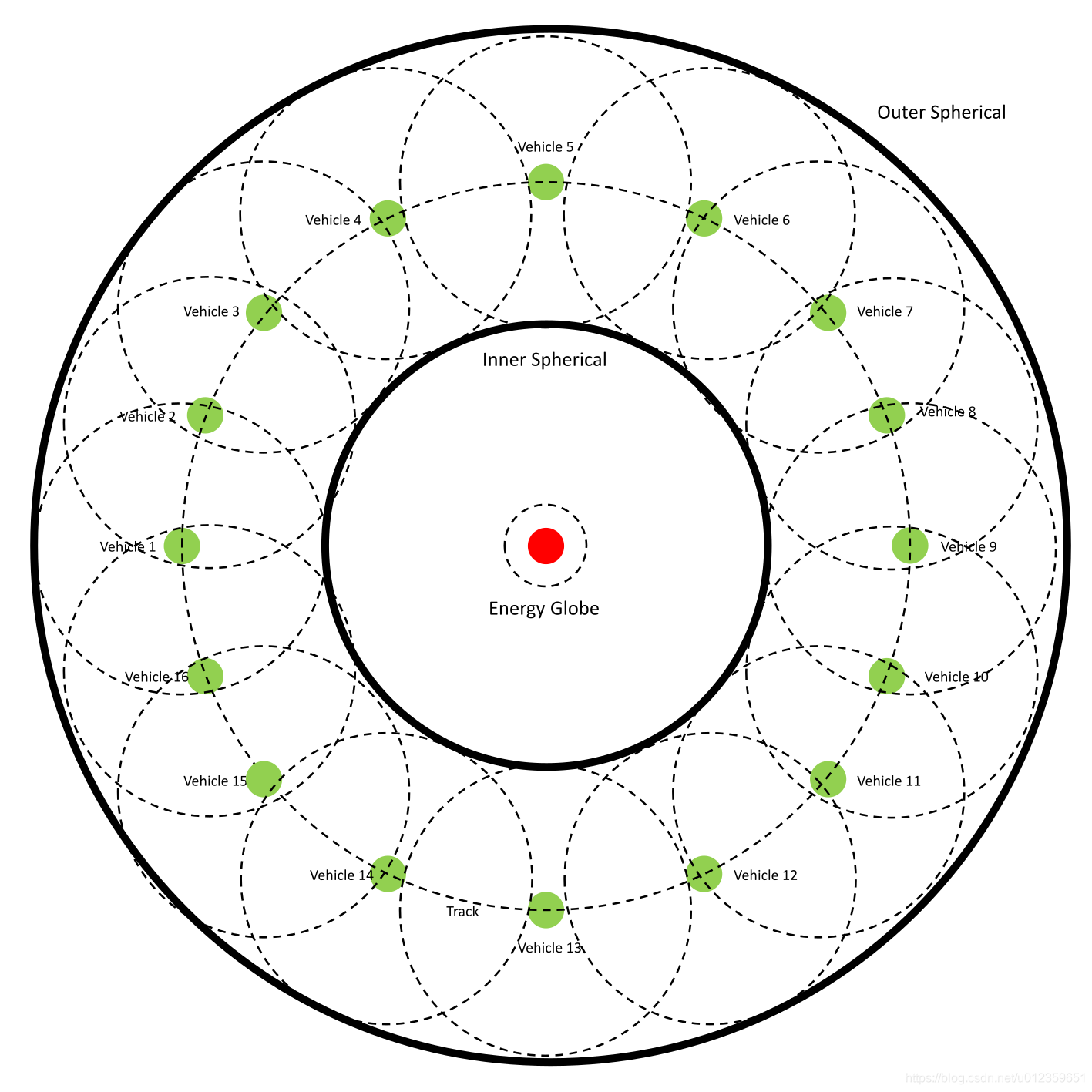
在理想的球星模型中,我们可以发现一个通讯环,在通讯环中的所有车都是互联的,并且中心的能量球很难突破这层环。在车进出通讯环时,我们可以通过当时的位置,动态修正半径大小。
我们分三种情况讨论该模型:
- 半径过大,此时会有更多的
车进到通讯环以内,从而使得半径变小。 - 半径国小,此时会有更多的
车进到通讯环以外,从而使得半径变大。 - 半径正好,进到通讯环以内的
车和进到通讯环以外的车大致是相同的,所以半径会稳定在某一个数值。
在自动修正半径时,我们需要一个学习率参数Track_Correction_Rate,来确保不会因为充能量的不确定性而使得半径不稳定。
要实现该模型,我们还需要存在一个弹出通讯环的效果,即车在能量球加完能量后,弹出到通讯环外。实现如下,
Actual_Radius_Vector := 1.5 * Rotated_Radius_Vector;
¶Stage D
最后一个阶段,要求车之间随机协商出一定数量的车存活,剩下的自主“死亡“,比如一开始是 64 个,最终要求剩下 42 个。
这个问题最简单的解决方案是直接从 1 开始分配编号,按照编号顺序“死亡”就好啦,但是我觉得这个方案无法体现随机。
通过分析,这个类似于现在大火的区块链中最重要的一个问题,即分布式节点如何达成共识,解决方案也是一样的:共识算法。
推荐观看李永乐老师:拜占庭将军问题是什么?区块链如何防范恶意节点?
¶共识算法(Consensus Algorithm)[1]
在这里我们仅利用共识算法的思想(不解决恶意节点问题),利用时间戳达成共识。
在车与车的通讯过程中,我们约定以下原则:
- 在消息中添加三个字段:
Vehicle_No数组,Target_No_of_Elements数组长度和Vehicle_List_Update_Time上一次更新时间。 - 所有的
车一直都能接受和发送信息。 - 在最开始,所有的
车都把自己的编号放到数组的第一个位置。 - 如果
车接收到的信息与自身存储的信息不同(数组长度不同,或者上一次更新时间不同),那么按照下面的规则确定保留哪个
保留数组更长的那个
选择上一次更新时间更早的那个 - 检查自己的编号是否在
Vehicle_No数组中,若不在并且仍有空间,那么就把自己的编号加进去。 - 在上一次更新时间又
Confirm_Time_Interval秒后,如果数组已满并且自己的编号不在里面,那么该车就不能再去加能量了。
经过实验,在 64 个车,缩减到 42 个的情况下,Confirm_Time_Interval设置为 1 秒就可以满足要求。
¶结果[2]
¶截图
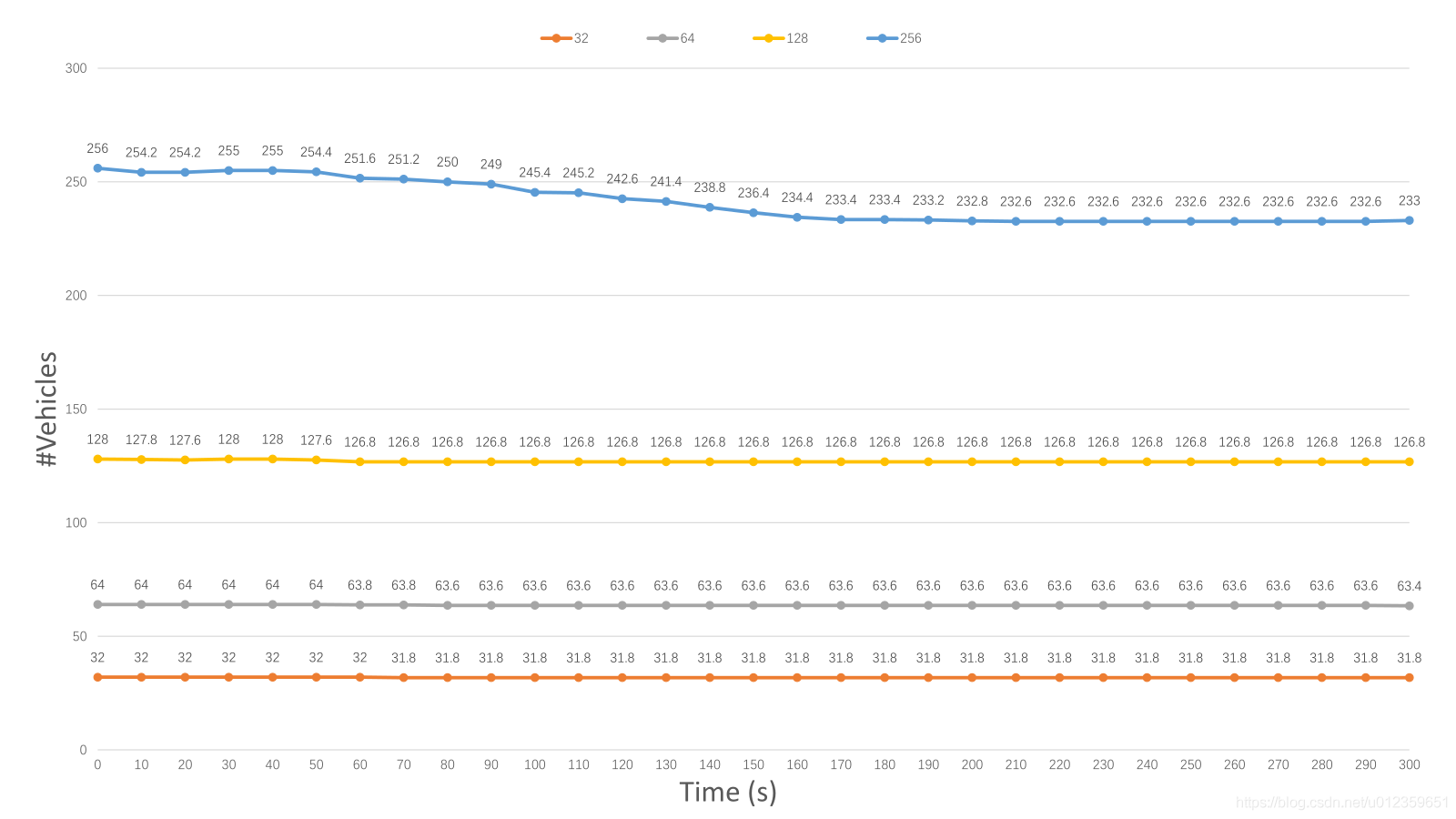
¶Stage A&B(Single_Globe_In_Orbit)
| Initial Number | Target Number | Duration | Test times | Average Result | Survival Rate | Average Frame Rate |
|---|---|---|---|---|---|---|
| 32 | 32 | 5 min | 5 | 31.8 | 0.99375 | 30 Hz |
| 64 | 64 | 5 min | 5 | 63.4 | 0.990625 | 28 Hz |
| 128 | 128 | 5 min | 5 | 126.8 | 0.990625 | 20 Hz |
| 256 | 256 | 5 min | 5 | 233 | 0.910156 | 9 Hz |
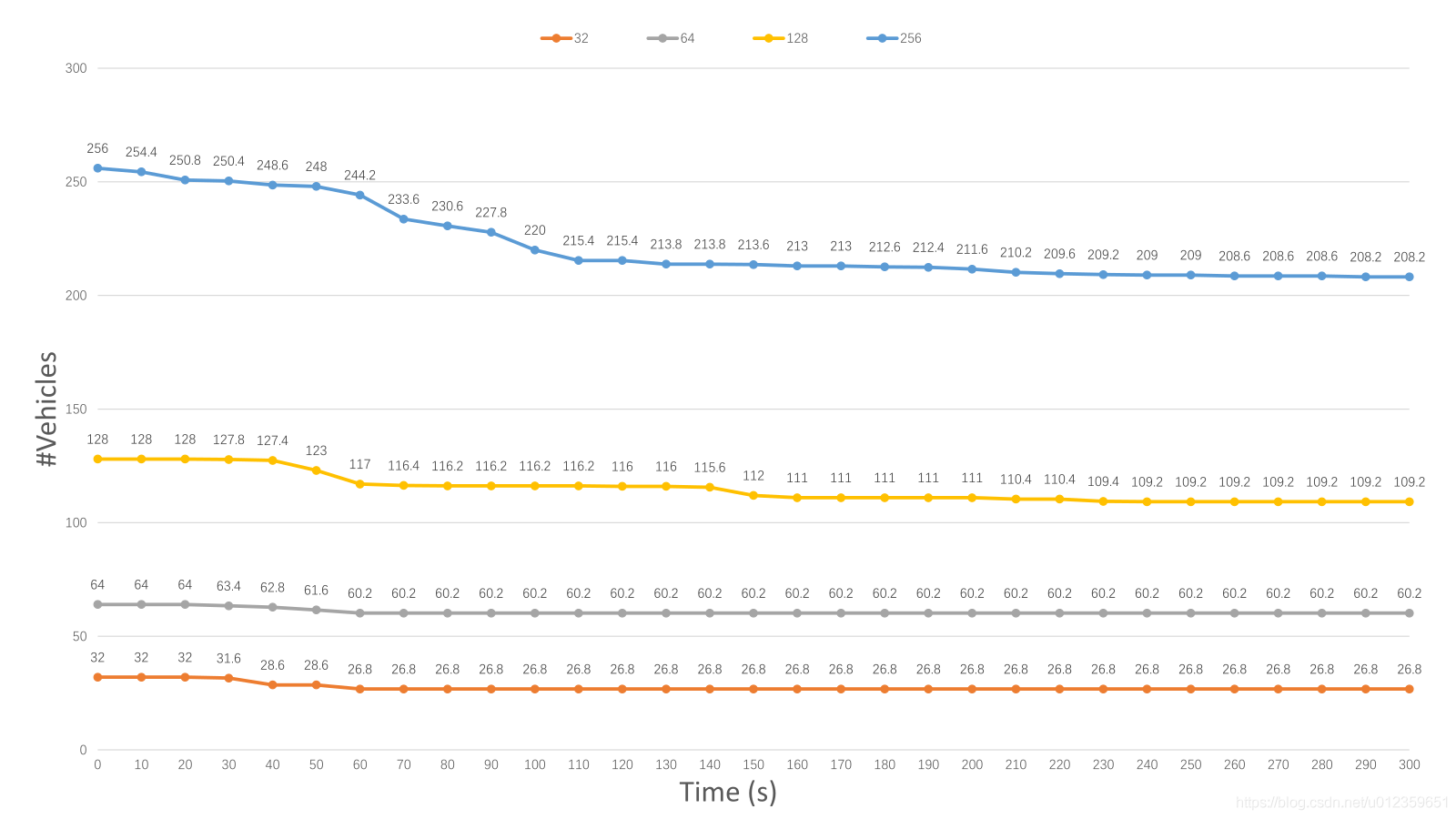
¶Stage C(Random_Globes_In_Orbits)
| Initial Number | Target Number | Duration | Test times | Average Result | Survival Rate | Average Frame Rate |
|---|---|---|---|---|---|---|
| 32 | 32 | 5 min | 5 | 26.8 | 0.8375 | 30 Hz |
| 64 | 64 | 5 min | 5 | 60.2 | 0.940625 | 28 Hz |
| 128 | 128 | 5 min | 5 | 109.2 | 0.853125 | 20 Hz |
| 256 | 256 | 5 min | 5 | 208.2 | 0.813281 | 9 Hz |
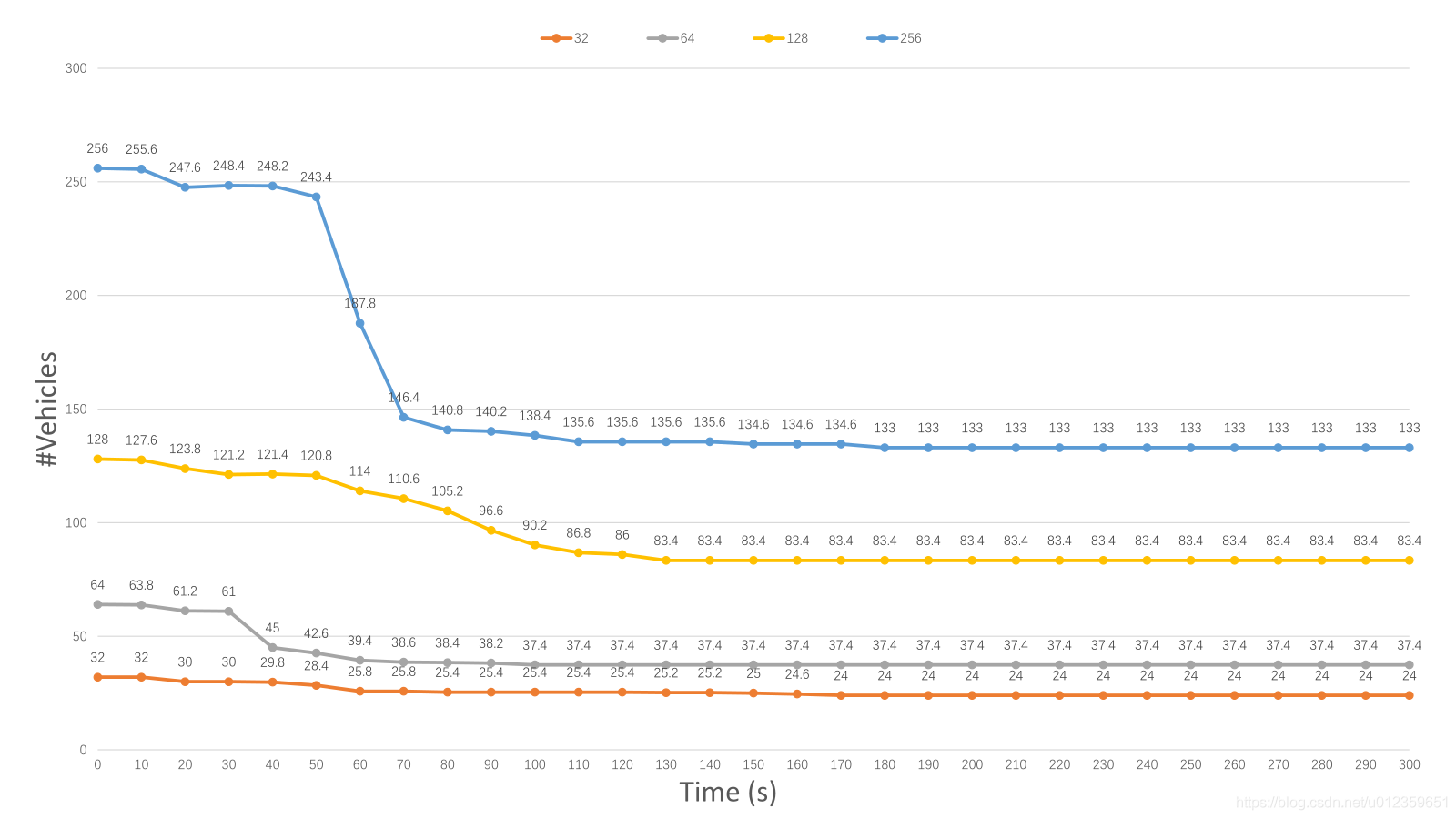
¶Stage D(Random_Globes_In_Orbits)
| Initial Number | Target Number | Duration | Test times | Average Result | Survival Rate | Average Frame Rate |
|---|---|---|---|---|---|---|
| 32 | 42 | 5 min | 5 | 24 | 0.571429 | 30 Hz |
| 64 | 42 | 5 min | 5 | 37.4 | 0.890476 | 28 Hz |
| 128 | 100 | 5 min | 5 | 83.4 | 0.834 | 20 Hz |
| 256 | 150 | 5 min | 5 | 133 | 0.886667 | 9 Hz |
¶感谢
感谢所有在作业中帮助过我的同学,辅导员和老师❤️。
共识算法:https://en.wikipedia.org/wiki/Consensus_decision-making ↩︎
测试平台: 笔记本 Intel I7 处理器 @ 3.43GHz,16GB 内存。因为我是用 Python 编写测试脚本,通过识别当前程序线程数量来判断
车的数量的,所以测试结果可能不准确。 ↩︎

目录
- 1. ¶前言
- 2. ¶问题
- 3. ¶分析
- 4. ¶实现
- 4.1. ¶Stage A&B
- 4.1.1. ¶基本程序结构(Basic Program Structure)
- 4.1.2. ¶消息结构(Message Structure)
- 4.1.3. ¶中央控制(Central Control)
- 4.1.4. ¶能量球位置估计(Energy Globe Position Estimation)
- 4.1.5. ¶充电决策(Charge Determination)
- 4.1.6. ¶半径决策(Radius Determination)
- 4.1.7. ¶使用当前能量优化半径(Radius Optimization With Current Charge)
- 4.1.8. ¶一个解决碰撞的机制(A Solution To Collision)
- 4.2. ¶Stage C
- 4.3. ¶Stage D
- 4.1. ¶Stage A&B
- 5. ¶结果[2]
- 6. ¶感谢